������Q���V�������Ԅӻ��O������˾
ϵ�ˣ���������������
ϵ�֙C��
�̶��Ԓ��
��I�]�䣺2382119668@qq.com
ϵ��ַ���V������ɳ�^���悔��a���@һ������201��
�]����
ϵ�ҕr��Ո�f���ھ��|�W�Ͽ����ģ��x�x��






| ���� (Kg) | 0.291 Kg |
| �aƷ�ߴ� (W x L X H) | δ�ṩ |
| ���b�ߴ� | 12.90 x 14.80 x 5.10 |
| ���b�ߴ��λ�Ĝy�� | CM |
| ������λ | 1 �� |
| ���b���� | 1 |
| �����aƷ��Ϣ | |
| EAN | 4025515070979 |
| UPC | 662643118063 |
| ��Ʒ���a | 85389091 |
| LKZ_FDB/ CatalogID | ST73 |
| �aƷ�M | 4031 |
| ԭ�a�� | �� |
| Compliance with the substance restrictions according to RoHS directive | RoHS ��Ҏ�_ʼ����: 2008.03.31 |
|
���T�ӹ��I�Ԅӻ��c�Ӽ��F������� |
�V�������Ԅӻ��O������˾ |
|
ϵ �ˣ� |
�� �� |
|
� Ԓ �� |
0 2 0- 3 9 0 0 8 7 5 9 |
|
�� �C �� |
1 7 7 2 8 1 9 8 3 3 1���ţ� |
|
�� �棺 |
0 2 0- 3 9 0 0 8 7 5 9 |
|
�̄� QQ : |
2 3 8 2 1 1 9 6 6 8 |
|
��˾��ַ�� |
�V������ɳ�^���悔��a���@1������ |
�V�������Ԅӻ��O������˾���������˞鱾�����m���£��ƌW�lչ������ᘣ������ڹ��I�Ԅӻ������I��ĮaƷ�_�l����������ϵ�y���ɣ������S�����Ԅӻ��aƷ�đ��ú͌��`����Լ��ۺ�ļ��g������������PLC����ϵ�y�����Ӽ��g���ã��ŷ�����ϵ�y�����خaƷ������˙C���漰�W�jܛ�����Þ鹫˾�ļ��g���L�������c�����T���Ԅӻ������Ӳ��Tչ�_���L�ھo�ܺ��������g���������õ���f���Pϵ�������T�ӿ������ϵ��I�Ճ��ݣ����탞�ݣ���I�Ļ����ݣ�������ɳ���Q�^��ȵĹ�˾����I�����ҽo�����P�Ķ��Ճ������ߣ�����˾���Z���ڱ��C�o��͑��ĮaƷ�����T��ȫ�£�ԭ�b����Ʒǰ���£��aƷ�r���I��ͬ�У����T���Ԅӻ��M��ϵ�Ѓ��ݷ��ȏ�5%��13%����������˾�aƷ��ُ�I�����_ʼ���������T���|��һ�꣬���|�ڃ���aƷ�����|�����}�����˞�p�ģ������M���Q�S�ޣ�����ȡ�κ��M�á�
�gӭ�����ԃ
�����������Ƅ������ǻ۹��S���M�� �_�����I4.0�r�������յ���
�V�ݳ������T��ԭ�bģ�M��ģ�K
��Ҫ���ݮaƷ���T�ӣ�S7-200CN��S7-200��Smart200��S7-300��S7-400��S7-1200���|������6FC��6SN��S120��V10��V20��V60��V80��G110��G120��6RA���ŷ��������NCU��MMϵ��׃�l����
���T��S7-1200 PLC�ڮ�ǰ���Ј��������V���đ��ã����鳣�c׃�l����ͬʹ�õ�PLC�����c���T��MM440 ׃�l����USSͨ��һֱ���Ј��������dz��V���đ��á����Č���Ҫ��B���ʹ��USSͨ�Ņf�h�팍�FS7-1200�cMM440׃�l����ͨ�š�
1. USSͨ�Ž�B
1.1. USS�f�h���c
USS (Universal Serial Interface, ��ͨ�ô���ͨ�Žӿ�) �����T�ӌ������b���_�l��ͨ�Ņf�h��USS �f�h�Ļ������c���£�
? ֧�ֶ��cͨ�ţ�������ԑ����� RS 485 �ȾW�j�ϣ�
? ���Æ���վ�ġ������ġ��L���C��
? ÿ���W�j���������� 32 �����c����� 31 ����վ��
? ���οɿ��Ĉ��ĸ�ʽ��ʹ������ݔ�`���Ч
? �����F���ɱ��^��
USS �Ĺ����C���ǣ�ͨ�ſ�������վ�l��USS ��վ����ѭ�h݆ԃ������վ����վ�����յ���ָ��Q���Ƿ��Լ����푑�����վ���h�������Ӱl�͔�������վ�����l���M��r����
-- ���յ�����վ���ě]���e�`������
-- ����վ�ڽ��յ���վ�����б���ַ
�����l�����M�㣬������վ�l�����ǏV�����ģ���վ�������κ�푑���������վ���f����վ����ڽ��յ���վ����֮���һ���r�g�Ȱl��푑�����t��վ��ҕ����e��
USS ���ַ���ݔ��ʽ���� UART Ҏ������ʹ�ô��Ю�����ݔ��ʽ��USS �ڴ��Д��������ϵ��ַ���ݔ���� 11 λ�L�ȣ����1��ʾ��

��1��USS�ַ���
USS �f�h�Ĉ��ĺ����ɿ�����Ч�`�������һ�B�����ַ��M�ɣ��f�h�ж��x����������
�����ܣ���2��ʾ��

��2��USS���ĽY��
ÿС�����һ���ַ����ֹ��������У�
STX�� ��ʼ�ַ������� 02 h
LGE�� �����L��
ADR����վ��ַ���������
BCC�� BCC ��
�������^�� PKW �^�� PZD �^�M�ɣ����3��ʾ��

��3��USS�������^
PKW�� �˅^�������x������ֵ���������x�������ı��������ĺ͈�慢���ĸ�׃ �����У�
PZD�� �˅^����������վ�͏�վ֮�g���f���ƺ��^�̔��������ƅ������O���õĹ̶���ʽ��������վ֮�g�����������磺
������ݔ�Ĕ�����ͺ����b�õIJ�ͬ��PKW �� PZD �^�Ĕ����L�ȶ����ǹ̶��ģ����������`���׃���m�����w����Ҫ�����ǣ��������c������ͨ�ŵ��Ԅӿ����΄Օr���W�j�ϵ����й��c��Ҫ����ͬ���O�����������������������^���в����S���׃��
ע�⣺
���ڲ�ͬ�����b�ú���ģʽ��PKW �� PZD ���L�ȿ���һ��Ҏ�ɶ��x�� һ���_���Ͳ������\�����S���׃ ��
PKW �����L�����Ќ� USS ͨ���_�ŵą������� PZD �H���L���ض��Ŀ��ƺ��^�̔�����
PKW ���S�����b������������_�΄�̎������� PZD �Č��r��Ҫ�� PKW �á�
1.2. S7-1200 USSͨ�ź���
CM 1241 RS485 ģ�Kͨ�^ RS485 �˿��cMM440�M��ͨ�š� ��ʹ�� USS �����MM440���x/��MM440������ԓ���ṩ 1 �� FB �� 3 �� FC ��֧�� USS �f�h�� ÿ�� CM1241 RS485 ͨ��ģ�K���֧�� 16 ��MM440���B�ӵ�һ�� CM 1241 RS485 ������MM440����� 16 ������ͬһ USS �W�j��һ���֡��B�ӵ���һ CM 1241 RS485 ������MM440����һ USS �W�j��һ���֡� ��� S7-1200���֧������ CM 1241 RS485 �O�䣬�����Ñ����ɽ������� USS �W�j��ÿ���W�j��� 16 ��MM440������֧�� 48 �� USS MM440���� USS �W�jʹ�ø���Ψһ�Ĕ����K�M�й�����ʹ������ CM 1241 RS485 �O�佨������ USS�W�j��Ҫ���������K���� ͬһUSS �W�j���P������ָ���횹���ԓ�����K�� �@�������ڿ��ƾW�j������MM440�� USS_DRV��USS_PORT��USS_RPM ��USS_WPM ָ�
2. Ӳ�����Ӿ�
2.1. Ӳ������
S7-1200 PLCĿǰ��3�N��͵�CPU��
1��S7-1211C CPU��
2��S7-1212C CPU��
3��S7-1214C CPU��
�@���N��͵�CPU������ʹ��USSͨ�Ņf�hͨ�^ͨ��ģ�KCM1241 RS485�팍�FS7-1200�cMM440׃�l����ͨ�š�
������ʹ�õ�PLCӲ���飺
1�� S7-1214C ( 6ES7 214 -1BE30 -0XB0 )
2) CM1241 RS485 ( 6ES7 241 -1CH30 -0XB0 )
3) CSM 1277 ( 6GK7 277 -1AA00 - 0AA0)
������ʹ�õ�MM440׃�l��Ӳ���飺
1�� MM440 �� 6SE6440 - 2AB11 - 2AA1 ��
2�� MICROMASTER 4 ENCODER MODULE �� 6SE6400 - 0EN00 - 0AA0 ��
3�� SIEMENS MOTOR �� 1LA7060 - 4AB10 - Z ��
4�� USS ͨ����| ( 6XV1830 - 0EH10 )
2.2. �Ӿ�
���hʹ�����T�ӵľW�j���^��PROFIBUS��|���� S7-1200 CPU ͨ�ſ���ʹ�����T�ӾW�j���^��
PROFIBUS ��|�ļtɫ����B �� RS 485 ��̖ +������̖�����B�ӵ� MM 440 ͨ�Ŷ˿ڵ� P+���Gɫ����A �� RS 485 ��̖ -������̖�����B�ӵ� MM 440 ͨ�Ŷ˿ڵ� N-��
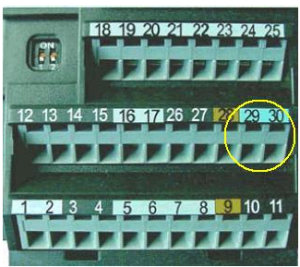

�D1�� MM440�Ӿ����� ��4��MM440���Ӷ��x
���MM 440 ͨ�ſ��Ƕ����B�ӣ����� PROFIBUS ��|����Ҫ�W�j���^�����DŽ������^ֱ�Ӊ��ڶ����ϡ����߀Ҫ�B����һ�����b�ã��t�ɗl��|��ͬɫо�����ԉ���ͬһ�����Ӄȡ�PROFIBUS ��|�ļtɫо������������� 29���Gɫо�������B�ӵ����� 30����D1����4��ʾ�������Ӿ��D��D2��ʾ��

�D2�� S7-1200�cMM440�Ӿ��D �V�ݳ������T��ԭ�bģ�M��ģ�K
a. ����/���o�ӵ�ĸ�ţ���ɿ��Ķ��c�ӵء����B�ӌ����Ƹɔ_����Ҫ���x��
b. PROFIBUS �W�j���^������ƫ�úͽK����衣
c. MM 440 �˵�ƫ�úͽK����衣
d. ͨ�ſڵĵ��λ�B�ӡ����Ա��oͨ�ſڲ�����ģ늉���p�Ļ�ͨ���Дࡣ
e. �p�g������|��PROFIBUS����|�����Ǹ���ͨ�ţ���|�����Ό���p�˽ӵأ��� PE����
ע�⣬�����c���W�j�������ИO����Ҫ��Ӱ푡������оW�jͨ���|������Ć��}���cδ���]������������P��
? ƫ����������ڏ��s�ĭh���´_��ͨ�ž��ϵ��ƽ�ڿ���δ���ӕr���ַ������K������������վW�j�ϵķ�����̖��һ�����ƵĿ����;W�j����ڃɶ˽�ƫ�úͽK����衣
? ͨ�ſ� M �ĵ��λ�B�ӽ��h�Ϊ������^�ֵČ��� ������Ҫʹ�� PROFIBUS �����Όӣ������B���Ͽ������^������������ͨ���Дࡣ
? PROFIBUS ��|�����Ό�Ҫ�M������e�� PE��һ�����õ��������ڿ������^���Ӿ�����̎�h����Ƥ���É�������¶�����ΌӉ��o�� PE �ӵ��w�ϣ��� PE ĸ�Ż����ýӵص���¶���ٰ��b�壩��
? ͨ�ž��c���������_�������o�N���ٰ尲�bҲ�ܸ��ƿ��ɔ_���������b�õ�ݔ��/ݔ����Ҫ�M�����ÞV���b�ã���ʹ��������|��
? �� MM 440 �İ��b���ṩ�˽K��ƫ�����Ԫ�����Ӿ��r�ɰ��f����ֱ�Ӊ��ڶ����ϡ�������ܣ��ɲ��ß�s�܌���Ԫ�����������m���̶���
3. �M�B
�҂�ͨ�^�����Č��H��������B�����Step7 Basic V10.5 �нM�BS7-1214C ��MM440׃�l����USSͨ�š�
3.1. PLC Ӳ���M�B
������Step7 Basic V10.5�н���һ���Ŀ����D3��ʾ��

�D3�� �½�S7 1200�Ŀ
��Ӳ�������У�����CPU1214C��ͨ��ģ�KCM1241 RS485ģ�K����D4��ʾ��

�D4�� S7 1200Ӳ������
��CPU�Č����У��O����̫�W��IP��ַ������PG�cPLC���B�ӣ���D5��ʾ��

�D5�� S7 1200 IP��ַ���O��
3.2. MM440�����O��
�҂��ٶ��ѽ���������b�õĻ��������O�ú��{ԇ����늙C�������R�ȵȣ�������ֻ�漰�c S7-1200 �������B�����P�ą�����
MM 440 �ą����֞�ׂ��L�����e���Ա����^�V����Ҫ�鿴�IJ��֡� �c S7-1200 �B�ӕr����Ҫ�O�õ���Ҫ�С�����Դ���͡��O��Դ���ɽM������Ҫ�O�ô��������Ҫ�����ҡ������L�����e����������Ҫ�� P0003 �����O�Þ� 3��
����Դ�����O�ã�
��������������b�õĆ��ӡ�ֹͣ����/���D�ȹ��ܡ�����Դ�����O�ÛQ�������b�ÏĺηN;�����ܿ�����̖�����5��ʾ��

��5������Դ�Ʌ��� P0700 �O��
�˅����зֽM���ڴ˃H�O��һ�M���� P0700[0]��
�O��Դ���ƅ�����
�O��ֵ�������b�õ��D��/�l�ʵȹ��ܡ��O��Դ�����Q�������b�Ï���������O��ֵ�����o���������6��ʾ��

��6���O��Դ�Ʌ��� P1000 �O��
�˅����зֽM���ڴ˃H�O��һ�M���� P1000[0]��
����Դ���O��Դ֮�g�������ɽM�ϣ�������ˇҪ������`���x�á��҂��Կ���Դ���O��Դ������ COM Link �ϵ� USS ͨ�Ş��������� USS ͨ�ŵą����O�á�
��Ҫ�����У�
1. P0700�� �O�� P0700[0] = 5��������Դ���� COM Link �ϵ� USS ͨ�ţ�
2. P1000�� �O�� P1000[0] = 5�����O��Դ���� COM Link �ϵ� USS ͨ�ţ�
3. P2009�� �Q���Ƿ� COM Link �ϵ� USS ͨ���O��ֵҎ�����O��ֵ�����\�D�l�ʵİٷֱ���ʽ��߀�ǽ^���l��ֵ����0����Ҏ�� USS ͨ���O��ֵ�����O����MM440�е��l���O�������İٷֱ���ʽ����1���� USS ͨ���O��ֵ�M��Ҏ�����O��ֵ��^�����l�ʔ�ֵ��
4. P2010�� �O�� COM Link �ϵ� USS ͨ�����ʡ����� S7-1200 ͨ�ſڵ����ƣ�֧�ֵ�ͨ�Ų��������7��ʾ��
| 4 | 2400 bit/s |
| 5 | 4800 bit/s |
| 6 | 9600 bit/s |
| 7 | 19200 bit/s |
| 8 | 38400 bit/s |
| 9 | 57600 bit/s |
| 12 | 115200 bit/s |
��7��ͨ�Ų�����
5. P2011�� �O�� P2011[0] = 0 �� 31�������b�� COM Link �ϵ� USS ͨ�ſ��ھW�j�ϵď�վ��ַ��
6. P2012�� �O�� P2012[0] = 2���� USS PZD �^�L�Ȟ� 2 �����L��
7. P2013�� �O�� P2013[0] = 4��
8. P2014�� �O�� P2014[0] = 0 �� 65535���� COM Link �ϵ� USS ͨ�ſ�����̖�Д೬�r�r�g����λ�� ms�����O�Þ� 0���t���M�д˶˿��ϵij��r�z�飻
9. P0971�� �O�� P0971 = 1������������������MM 440 �� EEPROM ��
4. USSͨ��ԭ���c���̵Č��F
4.1 S7 1200 PLC�cMM440 ͨ�^USSͨ�ŵĻ���ԭ��
S7 1200�ṩ�ˌ��õ�USS���M��USSͨ�ţ���D6��ʾ��

�D6��S7 1200 ���õ�USS��
USS_DRV���܉Kͨ�^USS_DRV_DB�����K���F�cUSS_PORT���܉K�Ĕ��������c���ͣ���USS_PORT���܉K��S7-1200 PLC CM1241 RS485ģ�K�cMM440֮�g��ͨ�Žӿڡ�USS_RPM���܉K��USS_WPM���܉K�cMM440��ͨ���cUSS_DRV���܉K��ͨ�ŷ�ʽ����ͬ�ġ���D7��ʾ��

�D7��ͨ�ŽY���D
4.2. ���܉Kʹ�ý�B
USS_DRV ���܉K��S7-1200 USSͨ�ŵ����w���܉K������MM440����Ϣ�Ϳ���MM440��ָ���ͨ�^�@�����ܿ����ɵġ�������� OB���{�á�
USS_PORT���܉K��S7-1200�cMM440�M��USSͨ�ŵĽӿڣ���Ҫ�O��ͨ�ŵĽӿڅ�����������OB���Д�OB���{�á�
USS_RPM���܉K��ͨ�^USSͨ���xȡMM440�ą������������ OB���{�á�
USS_WPM���܉K��ͨ�^USSͨ���O��MM440�ą������������ OB���{�á�
4.3. S7 1200 PLC�M��USSͨ�ŵľ���
4.3.1. USS_DRV���܉K�ľ���
USS_DRV���܉K�ľ�����D8��ʾ��

�D8�� USS_DRV���܉K�ľ���
USS_DRV���܉K�Á��cMM440�M�н��Q�������Ķ��xȡMM440�Ġ�B�Լ�����MM440���\�С�ÿ��MM440ʹ��Ψһ��һ��USS_DRV���܉K������ͬһ��CM1241 RS485ģ�K��USS�W�j������MM440�����16������ʹ��ͬһ��USS_DRV_DB��
| USS_DRV_DB�� ָ��MM440�M��USSͨ�ŵĔ����K�� | |||||
| RUN�� ָ��DB�K��MM440����ָ� | |||||
| OFF2�� �o��ֹͣ������ͣ܇�� ԓλ��0�rͣ܇�� | |||||
| OFF3�� ����ͣ܇�����Ƅ�ͣ܇��ԓλ��0�rͣ܇�� | |||||
| F_ACK�� MM440���ϴ_�J�� | |||||
| DIR �� MM440����늙C���D�� | |||||
| SPEED_SP�� MM440���ٶ��O��ֵ�� | |||||
| NDR�� �����;w�� | |||||
| ERROR�� ����ݔ���e�`�� | |||||
| RUN_EN�� MM440�\�Р�Bָʾ�� | |||||
| D_DIR�� MM440�\�з����Bָʾ�� | |||||
| INHIBIT�� MM440�Ƿ�ֹ�Ġ�Bָʾ�� | |||||
| FAULT�� MM440���ϡ� | |||||
| SPEED�� MM440�ķ����Č��H�ٶ�ֵ�� | |||||
| DRIVE�� MM440��USSվ��ַ��MM440����P2011�O�á� | |||||
| PZD_LEN�� PZD�������֔�����Чֵ2��4��6��8���֡�MM440����P2012�O�á� | |||||
4.3.2. USSͨ�Žӿڅ������܉K�ľ���
USSͨ�Žӿڅ������܉K�ľ�����D9��ʾ��

�D9�� USSͨ�Žӿڅ������܉K�ľ���
USS_PORT���܉K�Á�̎��USS�W�j�ϵ�ͨ�ţ�����S71200 CPU�cMM440��ͨ�Žӿڡ�ÿ��CM1241 RS485ģ�K���ұ����һ��USS_PORT���܉K��
PORT�� ͨ��ģ�K���R������Ĭ�J׃�����ġ�������(Constants) �x헿������õij�����
BAUD�� ָ���Ǻ�MM440�M��ͨ�е����ʡ� MM440�ą���P2010�N�M���O�á�
USS_DB�� �������Ñ������з��� USS_DRV ָ��r�����ͳ�ʼ���ı��������K��
ERROR�� ݔ���e�`��
STATUS��������ʼ���Ġ�B��
USS_PORT ����ͨ�^�V�ݳ������T��ԭ�bģ�M��ģ�KRS485ͨ��ģ�K̎�� CPU ��׃�l��֮�g�Č��Hͨ�š� ÿ���{�ô˹��ܿ�̎���cһ��׃�l����һ��ͨ�š� �Ñ������횱M���{�ô˹����Է�ֹ�c׃�l��ͨ�ų��r�� ������ OB ���κ��Д� OB ���{�ô˹��ܡ�ͨ����ѭ�h�Д� OB �{��USS_PORT �Է�ֹ׃�l�����r�Լ�ʹ USS_DRV �{�õ� USS �����������¡�
S7-1200 PLC�cMM440��ͨ�����c�������Ē������ڲ�ͬ���ģ������һ���cMM440��ͨ���¼�֮ǰ��S7-1200ͨ������˶������衣
USS_PORTͨ�ŵĕr�g�g����S7-1200�cMM440ͨ������Ҫ�ĕr�g����ͬ��ͨ�Ų����ʌ����IJ�ͬ��USS_PORTͨ���g���r�g����8�г��˲�ͬ�IJ����ʌ�����USS_PORT��Сͨ���g���r�g��

��8����ͬ�IJ����ʌ�����USS_PORT��Сͨ���g���r�g
USS_PORT�ڰl��ͨ���e�`�r��ͨ���M��3�·Lԇ�����ͨ���¼�����ôS7-1200�cMM440ͨ�ŵĕr�g����USS_PORT�l��ͨ�ų��r�ĕr�g�g�������磺���ͨ�Ų�������9600����ôUSS_PORT�cMM440ͨ�ŵĕr�g�g������������С���{�Õr�g�g����������116.3�����С��349���롣S7-1200 USS �f�h��Ĭ�J��ͨ���e�`���r�Lԇ�Δ���2�Ρ�
�������ϵ�USS_PORTͨ�ŕr�g��̎�������h��ѭ�h�Д�OB�K���{��USS_PORTͨ�Ź��܉K���ڽ���ѭ�h�Д�OB�K�r���҂������O��ѭ�h�Д�OB�K�Ē���r�g���ԝM��ͨ�ŵ�Ҫ��ѭ�h�Д�OB�K�Ē���r�g���O����D10��ʾ��

�D10��ѭ�h�Д�OB�K�Ē���r�g���O��
4.3.3. USS_RPM���܉K�ľ���
USS_RPM���܉K�ľ��� ��D11��ʾ��

�D11��USS_RPM���܉K�ľ���
USS_RPM���܉K����ͨ�^USSͨ�ŏ�MM440�xȡ������
| REQ�� �xȡ����Ո�� | |||
| DRIVE�� MM440��USSվ��ַ�� | |||
| PARAM�� MM440�ą������a�� | |||
| INDEX�� MM440�ą����������a | |||
| USS_DB��ָ��MM440�M��USSͨ�ŵĔ����K�� | |||
| DONE�� �xȡ������ɡ� | |||
| ERROR�� �xȡ�����e�`�� | |||
| STATUS���xȡ������B���a�� | |||
| VALUE�� ���xȡ�ą�����ֵ�� | |||
ע�⣺�M���xȡ�������܉K���̕r�����������Ĕ������һ��Ҫ���_������
4.3.4. USS_WPM���܉K�ľ���
USS_WPM���܉K�ľ�����D12��ʾ��

�D12��USS_WPM���܉K�ľ���
USS_WPM���܉K����ͨ�^USSͨ���O��MM440�ą�����
| REQ�� ������Ո�� | |||
| DRIVE�� MM440��USSվ��ַ�� | |||
| PARAM�� MM440�ą������a�� | |||
| INDEX�� MM440�ą����������a�� | |||
| EEPROM���х����惦��MM440��EEPROM�� | |||
| VALUE�� �O�Å�����ֵ�� | |||
| USS_DB��ָ��MM440�M��USSͨ�ŵĔ����K�� | |||
| DONE�� �xȡ������ɡ� | |||
| ERROR�� �xȡ�����e�`��B�� | |||
ע�⣺�����녢�����܉K���̕r�����������Ĕ������һ��Ҫ���_������
4.3.5. ��Ҋ�e�`
����x��ͬ�rʹ�ܣ��t���e818A������Ո��ͨ�����ڱ���׃�l������һՈ��ռ�á���D13��ʾ��

�D13���x��ͬ�rʹ�܈��e
���ͨ�Ŕ��_���tPORT���e818B����D14��ʾ��

�D14��ͨ�Ŕ��_���e
����ٶ��O��ֵ�����_���t���e8186����D15��ʾ��

�D15���ٶ��O��ֵ�e�`
�P�I�~ �V�ݳ������T��ԭ�bģ�M��ģ�K
USS �f�h��
SINAMICS V90�ŷ��Ӻ� SIMOTICS S-1FL6 �ŷ�늙C�M�������܃���������ʹ�õ��ŷ���ϵ�y���˷N����ͣ��߷N��ͬ��늙C�S��Ҏ���ʷ�����0.05kW��7.0kW�Լ����������Ĺ��ϵ�yʹ����ԏV�����ڸ��и��I���磺��λ��ݔ�ͣ��շž����O���У�ͬ�rԓ�ŷ�ϵ�y�����cS7-1500T/S7-1500/S7-1200 �M��������ϣ����F�S��������݆/�X݆���\�ӿ��ƹ��ܣ������ڙM�С������O���С�

���M��һ�I�������Ԅӌ��r��������ʹ�O��@�ø��ߵĄӑB����
�Ԅ����ƙCе�C���l��
1 MHz �ĸ����}�_ݔ��
20 λ�ֱ��ʵĶ�Ȧ�^��ֵ���a��
�������п���ģʽ���ⲿ�}�_λ�ÿ��ơ��Ȳ��O��ֵλ�ÿ��ƣ�ͨ�^���� Modbus��PROFINET�����ٶȿ��ƺ�Ť�ؿ���
���ɃȲ��O��ֵλ�ÿ��ƹ���
ȫ�����Ә�������Ƅ����
���ɱ��l�^�����400V �ͣ����o���ⲿ�^���
������ PTI, PROFINET, USS, Modbus RTU��N��λ�ӿڷ�ʽ
�c����ϵ�y���B�ӿ�ݺ���
���T��һվʽ�ṩ���нM��
���ٱ�ݵ��ŷ������͙Cе����
�������õ� SINAMICS V-ASSISTANT �{ԇ����
ͨ�� SD ����������
������늉�������200 V ... 240 V �C15% / +10% (230V ��) �� 380 V ... 480 V �C15% / +10% (400V ��)
��Ʒ�|��늙C�S��
늙C���o�ȼ� IP 65���S�˘����ͷ�
���ɰ�ȫŤ��ֹͣ��STO������
���c늙C�ɿ��M��

|
���g���� |
|
|---|---|
|
�S��*: |
20 mm, 30 mm, 40 mm, 50 mm |
|
�~��Ť��: |
0.16 Nm �� 6.37 Nm |
|
�~��/����ٶ�: |
3000 rpm / 5000 rpm |
|
���a��: |
����ʽ TTL 2500 S/R (13 λ) |
|
���o�ȼ�: |
IP65 |
|
�x��: |
���l |
|
�S���: |
���S��ƽ�I |

|
���g���� |
|
|---|---|
|
�S��*: |
45 mm, 65 mm, 90mm |
|
�~��Ť��: |
1.27 Nm �� 33.40 Nm |
|
�~��/����ٶ�: |
2000 rpm / 3000 rpm |
|
���a��: |
����ʽ���a�� TTL 2500 S/R (13 λ �ֱ���) |
|
���o�ȼ�: |
IP65 |
|
�x��: |
���l |
|
�S���: |
���S��ƽ�I |

|
���g���� |
|
|---|---|
|
���ʷ���: |
1AC 0.05 kW �� 0.75 kW |
|
늉�: |
1AC 200 V��240 V (-15 % / +10 %) |
|
����ģʽ |
�ⲿ�}�_λ�ÿ��ƣ�PTI�棩���Ȳ��O��ֵλ�ÿ��ơ��ٶȿ��ơ�Ť�ؿ��� |
|
���o�ȼ�: |
IP20 |










 ��վ֩���ģ�壺
����|
�ذ���|
ͨ����|
��ɽ��|
������|
����|
����|
������|
������|
������|
�°Ͷ�������|
���տ���|
�J��|
������|
��̨��|
��ɽ��|
�山��|
��������|
��������|
������|
����|
������|
��ɽ|
��������|
������|
��Ϫ��|
������|
�ڳ���|
������|
������|
������|
������|
������|
˫����|
ƽ����|
��ɽ��|
������|
������|
������|
������|
������|
��վ֩���ģ�壺
����|
�ذ���|
ͨ����|
��ɽ��|
������|
����|
����|
������|
������|
������|
�°Ͷ�������|
���տ���|
�J��|
������|
��̨��|
��ɽ��|
�山��|
��������|
��������|
������|
����|
������|
��ɽ|
��������|
������|
��Ϫ��|
������|
�ڳ���|
������|
������|
������|
������|
������|
˫����|
ƽ����|
��ɽ��|
������|
������|
������|
������|
������|