�|ݸ�S��̫ƽ��R45GENA-R2-NS-NV-00�ŷ�늙C
1���ŷ�ϵ�y��servo mechanism����ʹ���w��λ�á���λ��
 �ŷ�늙C���D1�� [1]
�ŷ�늙C���D1�� [1]
��B��ݔ���������܉���Sݔ��Ŀ�ˣ���o��ֵ��������׃�����Ԅӿ���ϵ�y���ŷ���Ҫ��
�}�_����λ�������Ͽ����@�����⣬�ŷ�늙C���յ�1���}�_���͕����D1���}�_�����ĽǶȣ��Ķ����Fλ�ƣ���飬�ŷ�늙C�����߂�l���}�_�Ĺ��ܣ������ŷ�늙Cÿ���Dһ���Ƕȣ������l�������������}�_���@�ӣ����ŷ�늙C���ܵ��}�_�γ��˺��������߽��]�h�����һ����ϵ�y�͕�֪���l�˶����}�_�o�ŷ�늙C��ͬ�r�����˶����}�_�����@�ӣ����܉�ܾ��_�Ŀ���늙C���D�ӣ��Ķ����F���_�Ķ�λ�������_��0.001mm��ֱ���ŷ�늙C�֞���ˢ�͟oˢ늙C��
��ˢ늙C�ɱ��ͣ��Y�����Σ�����
�D�����{�ٷ��������������ף���Ҫ�S�o�����S�o�����㣨�Q̼ˢ�����a��
늴��ɔ_�����h����Ҫ��������������ڌ��ɱ����е���ͨ���I�����È��ϡ�
�oˢ늙C�w�eС�������p��������푑��죬�ٶȸߣ��T��С���D��ƽ�������ط��������Ə��s�������F���ܻ�������ӓQ�ʽ�`����Է����Q������Ҳ��Q�ࡣ늙C��S�o��Ч�ʺܸߣ��\�Мضȵͣ�늴�ݗ���С���L�����������ڸ��N�h����
2�������ŷ�늙CҲ�ǟoˢ늙C���֞�ͬ����
����늙C��Ŀǰ
�\�ӿ�����һ�㶼��ͬ��늙C�����Ĺ��ʷ������������ܴ�Ĺ��ʡ���T��������D���ٶȵͣ����S��������������ٽ��͡�����m��������ƽ���\�еđ��á�
3���ŷ�늙C�Ȳ����D���������F���������Ƶ�U/V/W������γ�늴ň����D���ڴ˴ň����������D�ӣ�ͬ�r늙C�Ԏ��ľ��a��������̖�o������������������ֵ�cĿ��ֵ�M�б��^���{��
�D���D�ӵĽǶȡ��ŷ�늙C�ľ��țQ���ھ��a���ľ��ȣ���������
�����ŷ�늙C�͟oˢֱ���ŷ�늙C�ڹ����ϵą^�e�������ŷ�Ҫ��һЩ����������Ҳ����ƣ��D���}��С��ֱ���ŷ������β�����ֱ���ŷ����^���Σ����ˡ�
�|ݸ�S��̫ƽ��R45GENA-R2-NS-NV-00�ŷ�늙C
�ԏĵ�MANNESMANN��Rexroth��˾��Indramat�ֲ���1978��
�h�Z���Q�ײ��[��
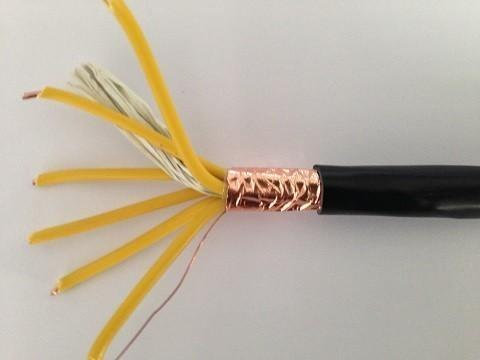
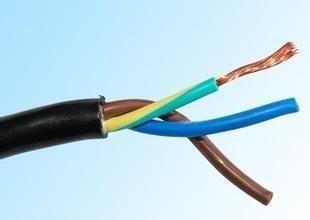
 �����ŷ�늙C���D����
�����ŷ�늙C���D����
����ʽ�Ƴ�MAC���Ž����ŷ�늄әC����ϵ�y���@��־���˷N��һ�������ŷ����g���M�댍�û��A�Ρ���20���o80����к��ڣ�����˾������������ϵ�ЮaƷ�������ŷ��b���Ј����D����
����ϵ�y�����ڵ�ģ�Mϵ�y���T����Ư�����ɔ_���ɿ��ԡ����Ⱥ����Եȷ�����ڲ��㣬�в�����ȫ�M��
�\�ӿ�����Ҫ������S��̎����������
������̖̎������DSP���đ��ã����F�˔��ֿ���ϵ�y�����Ʋ��ֿ���ȫ��ܛ���M�У��քe�Q��ֱ���ŷ�ϵ�y���������Ž����ŷ�ϵ�y��
��Ŀǰ��ֹ�������ܵ���ŷ�ϵ�y����������ͬ���ͽ����ŷ�늄әC��������������ÿ��١��ʴ_��λ��ȫ����
λ���ŷ�ϵ�y���������a�S��������T�ӡ�����
�Ơ�Ħ�����ձ����¼������ȹ�˾��
�ձ�����늙C�������Ƴ���С�ͽ����ŷ�늄әC������������Dϵ���m���ڔ��ؙC��������D�ٞ�1000r/min�����؞�0.25��2.8N.m����Rϵ���m���ڙC���ˣ�����D�ٞ�3000r/min�����؞�0.016��0.16N.m����֮�����Ƴ�M��F��S��H��C��G ����ϵ�С�20���o90����Ⱥ��Ƴ����µ�Dϵ�к�Rϵ�С����fϵ�о��β��ӡ�8051
��Ƭ�C���ƸĞ����Ҳ��ӡ�80C��154CPU���T���оƬ���ƣ����ز�����24%���͵�7%��������˿ɿ��ԡ��@�ӣ�ֻ���ˎ���r�g�γ��˰˂�ϵ�У����ʷ�����0.05��6kW���^�������wϵ���M���˹����Cе�����\�C�������әCе�ˡ��b��C���ˡ���Ӳ������ӹ��Cе��ӡˢ�C�����پ��@�C��
�@���C�ȵIJ�ͬ��Ҫ��
�����a
�C�������b�����������ձ��l�ǿƣ�Fanuc����˾����20���o80�������Ҳ�Ƴ���Sϵ�У�13��Ҏ��Lϵ�У�5��Ҏ�����Ž����ŷ�늄әC��Lϵ�����^С���D�ӑT���͙Cе�r�g�������m����Ҫ���e����푑���
λ���ŷ�ϵ�y��
�ձ������S�̣����磺
����늄әC��HC-KFS��HC-MFS��HC-SFS��HC-RFS��HC-UFSϵ�У����|֥���C��SMϵ�У��������F����(BLϵ�У�������늚⣨BLϵ�У���
��ʯ늙C��Sϵ�У��ȱ����S��Ҳ�M�������Ž����ŷ�ϵ�y�ĸ������С�
����ʿ����˾��Rexroth����Indramat�ֲ���MACϵ�н����ŷ�늄әC����7���C��̖92��Ҏ��
�|ݸ�S��̫ƽ��R45GENA-R2-NS-NV-00�ŷ�늙C