������Q������һ�Z�C��������˾
ϵ�ˣ����¸���������
ϵ�֙C��
�̶��Ԓ��
��I�]�䣺3100544643@qq.com
ϵ��ַ���V�|ʡ�����Ќ����^����悺�ʢ���I�^5��3��
�]����518103
ϵ�ҕr��Ո�f���ھ��|�W�Ͽ����ģ��x�x��
��ɽ�S��Pacific Scientific PC834-104-N �ŷ�����
Ŀǰ�������ŷ����������Ô�����̖̎������DSP��������ƺ��ģ����Ԍ��F���^���s�Ŀ����㷨�����F���ֻ����W�j�������ܻ������������ձ���������ܹ���ģ�K��IPM��������OӋ�����·��IPM�Ȳ����������·��ͬ�r�����^늉����^������^�ᡢǷ���ȹ��ϙz�y���o�·��������·��߀����ܛ�����·���ԜpС�����^�̌������ě_����
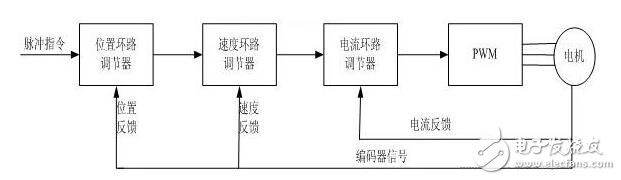
�����ӆ�Ԫ����ͨ�^����ȫ�������·��ݔ�������늻�������M���������õ�������ֱ��늡����^�����õ�����늻���늣���ͨ�^��������PWM늉�����׃��׃�l������������ʽͬ�������ŷ�늙C�������ӆ�Ԫ�������^�̿��Ժ��ε��f����AC-DC-AC���^�̡�������Ԫ��AC-DC����Ҫ���ؓ��·������ȫ�������·��
�S���ŷ�ϵ�y�Ĵ�Ҏģ���ã��ŷ�����ʹ�á��ŷ������{ԇ���ŷ������S�����ŷ������ڮ�����^��Ҫ�ļ��g�n�}��Խ��Խ��ؼ��g�����̌��ŷ������M���˼��g��Ӵ��о���
��ɽ�S��Pacific Scientific PC834-104-N �ŷ�����
һ���ŷ��������N���Ʒ�ʽ��λ�ÿ��Ʒ�ʽ���D�ؿ��Ʒ�ʽ���ٶȿ��Ʒ�ʽ��
1��λ�ÿ��ƣ�λ�ÿ���ģʽһ����ͨ�^�ⲿݔ����}�_���l�ʁ��_���D���ٶȵĴ�С��ͨ�^�}�_�Ă������_���D�ӵĽǶȣ�Ҳ��Щ�ŷ�����ͨ�^ͨӍ��ʽֱ�ӌ��ٶȺ�λ���M���xֵ������λ��ģʽ���Ԍ��ٶȺ�λ�ö��к܇���Ŀ��ƣ�����һ�㑪���ڶ�λ�b�á�
2���D�ؿ��ƣ��D�ؿ��Ʒ�ʽ��ͨ�^�ⲿģ�M����ݔ���ֱ�ӵĵ�ַ���xֵ���O��늙C�S�����ݔ���D�صĴ�С������ͨ�^���r�ĸ�׃ģ�M�����O������׃�O�������ش�С��Ҳ��ͨ�^ͨӍ��ʽ��׃�����ĵ�ַ�Ĕ�ֵ�팍�F��
������Ҫ�ڌ����|�������Ї���Ҫ����p�@�ͷž����b���У������@���b�û������w�O�䣬�D�ص��O��Ҫ�����p�@�İ돽��׃���S�r�����Դ_�����|�����������S���p�@�돽��׃������׃��
3���ٶ�ģʽ��ͨ�^ģ�M����ݔ����}�_���l�ʶ������M���D���ٶȵĿ��ƣ�������λ�����b�õ���hPID���ƕr�ٶ�ģʽҲ�����M�ж�λ������횰�늙C��λ����̖��ֱ��ؓ�d��λ����̖�o��λ���������\���á�λ��ģʽҲ֧��ֱ��ؓ�d��h�z�yλ����̖���˕r��늙C�S�˵ľ��a��ֻ�z�y늙C�D�٣�λ����̖����ֱ�ӵ���Kؓ�d�˵ęz�y�b�Á��ṩ�ˣ��@�ӵă��c���ڿ��Ԝp�����g�����^���е��`�����������ϵ�y�Ķ�λ���ȡ�
�����늙C���ٶȡ�λ�ö��]��Ҫ��ֻҪݔ��һ�����D�أ���Ȼ�����D��ģʽ��
�����λ�ú��ٶ���һ���ľ���Ҫ�������r�D�ز��Ǻ��P�ģ����D��ģʽ��̫���㣬���ٶȻ�λ��ģʽ���^�á�
�����λ�������б��^�õ��]�h���ƹ��ܣ����ٶȿ���Ч������һ�c���������Ҫ���Ǻܸߣ��������]�Ќ��r�Ե�Ҫ����λ�ÿ��Ʒ�ʽ��
��ɽ�S��Pacific Scientific PC834-104-N �ŷ�����