
“ī(q©▒)äė(d©░ng)Ų„╩Ū░čėŗ(j©¼)╦ŃÖC(j©®)┐žųŲŽĄĮy(t©»ng)╠ß╣®Ą─╚§ļŖą┼╠¢(h©żo)Ę┼┤¾×ķ▓Į▀M(j©¼n)ļŖÖC(j©®)─▄ē“Įė╩▄Ą─ÅŖ(qi©óng)ļŖ┴„ą┼╠¢(h©żo)Ż¼┐žųŲŽĄĮy(t©»ng)╠ß╣®Įo“ī(q©▒)äė(d©░ng)Ų„Ą─ą┼╠¢(h©żo)ų„ę¬ėąęįŽ┬╚²┬ĘŻ║
1Ż«▓Į▀M(j©¼n)├}ø_ą┼╠¢(h©żo)CPŻ║▀@╩ŪūŅųžę¬Ą─ę╗┬Ęą┼╠¢(h©żo)Ż¼ę“?y©żn)ķ▓Į▀M(j©¼n)ļŖÖC(j©®)“ī(q©▒)äė(d©░ng)Ų„Ą─įŁ└ĒŠ═╩Ūę¬░č┐žųŲŽĄĮy(t©»ng)░l(f©Ī)│÷Ą─├}ø_ą┼╠¢(h©żo)▐D(zhu©Żn)╗»×ķ▓Į▀M(j©¼n)ļŖÖC(j©®)Ą─ĮŪ╬╗ęŲŻ¼╗“š▀šf(shu©Ł)Ż║“ī(q©▒)äė(d©░ng)Ų„├┐Įė╩▄ę╗éĆ(g©©)├}ø_ą┼╠¢(h©żo)CPŻ¼Š═“ī(q©▒)äė(d©░ng)▓Į▀M(j©¼n)ļŖÖC(j©®)ą²▐D(zhu©Żn)ę╗▓ĮŠÓĮŪŻ¼ CPĄ─Ņl┬╩║═▓Į▀M(j©¼n)ļŖÖC(j©®)Ą─▐D(zhu©Żn)╦┘│╔š²▒╚Ż¼ CPĄ─├}ø_éĆ(g©©)öĄ(sh©┤)øQČ©┴╦▓Į▀M(j©¼n)ļŖÖC(j©®)ą²▐D(zhu©Żn)Ą─ĮŪČ╚ĪŻ▀@śėŻ¼┐žųŲŽĄĮy(t©»ng)═©▀^(gu©░)├}ø_ą┼╠¢(h©żo)CPŠ═┐╔ęį▀_(d©ó)ĄĮļŖÖC(j©®)š{(di©żo)╦┘║═Č©╬╗Ą──┐Ą─ĪŻ
2Ż«ĘĮŽ“ļŖŲĮą┼╠¢(h©żo)DIRŻ║┤╦ą┼╠¢(h©żo)øQČ©ļŖÖC(j©®)Ą─ą²▐D(zhu©Żn)ĘĮŽ“ĪŻ▒╚╚ńšf(shu©Ł)Ż¼┤╦ą┼╠¢(h©żo)×ķĖ▀ļŖŲĮĢr(sh©¬)ļŖÖC(j©®)×ķĒśĢr(sh©¬)ßśą²▐D(zhu©Żn)Ż¼┤╦ą┼╠¢(h©żo)×ķĄ═ļŖŲĮĢr(sh©¬)ļŖÖC(j©®)ät×ķĘ┤ĘĮŽ“─µĢr(sh©¬)ßśą²▐D(zhu©Żn)ĪŻ┤╦ĘNōQŽ“ĘĮ╩ĮŻ¼╬ęéāĘQų«×ķå╬├}ø_ĘĮ╩ĮĪŻ┴Ē═ŌŻ¼▀Ćėąę╗ĘNļp├}ø_ōQŽ“ĘĮ╩ĮŻ║“ī(q©▒)äė(d©░ng)Ų„Įė╩▄ā╔┬Ę├}ø_ą┼╠¢(h©żo)Ż©ś╦(bi©Īo)ūó×ķCW║═CCWŻ®Ż¼«ö(d©Īng)Ųõųąę╗┬ĘŻ©╚ńCWŻ®ėą├}ø_ą┼╠¢(h©żo)Ģr(sh©¬)Ż¼ļŖÖC(j©®)š²Ž“▀\(y©┤n)ąąŻ¼«ö(d©Īng)┴Ēę╗┬ĘŻ©╚ńCCWŻ®ėą├}ø_ą┼╠¢(h©żo)Ģr(sh©¬)Ż¼ļŖÖC(j©®)Ę┤Ž“▀\(y©┤n)ąąĪŻė├æ¶╩╣ė├║╬ĘNĘĮ╩ĮŻ¼ė╔ō▄╬╗ķ_ĻP(gu©Īn)įO(sh©©)Č©ĪŻ
3Ż« ╩╣─▄ą┼╠¢(h©żo)ENŻ║┤╦ą┼╠¢(h©żo)į┌▓╗▀BĮėĢr(sh©¬)─¼šJ(r©©n)×ķėąą¦ĀŅæB(t©żi)Ż¼▀@Ģr(sh©¬)“ī(q©▒)äė(d©░ng)Ų„š²│Ż╣żū„ĪŻ«ö(d©Īng)┤╦ą┼╠¢(h©żo)╗ž┬Ęī¦(d©Żo)═©Ģr(sh©¬)Ż¼“ī(q©▒)äė(d©░ng)Ų„═Żų╣╣żū„Ż¼▀@Ģr(sh©¬)ļŖÖC(j©®)╠Äė┌¤o(w©▓)┴”ŠžĀŅæB(t©żi)Ż©Ą╚═¼ė┌▒Š╣½╦ŠSHŽĄ┴ą“ī(q©▒)äė(d©░ng)Ų„Ą─FREEą┼╠¢(h©żo)Ż®Ż¼┤╦ą┼╠¢(h©żo)×ķ▀xė├ą┼╠¢(h©żo)ĪŻ
×ķ┴╦╩╣┐žųŲŽĄĮy(t©»ng)║═“ī(q©▒)äė(d©░ng)Ų„─▄ē“š²│ŻĄ─═©ą┼Ż¼▒▄├ŌŽÓ╗źĖ╔ö_Ż¼╬ęéā?c©©)┌“?q©▒)äė(d©░ng)Ų„ā╚(n©©i)▓┐▓╔ė├╣Ō±ŅŲ„╝■ī”(du©¼)▌ö╚ļą┼╠¢(h©żo)▀M(j©¼n)ąąĖ¶ļxŻ¼╚²┬Ęą┼╠¢(h©żo)Ą─ā╚(n©©i)▓┐Įė┐┌ļŖ┬ĘŽÓ═¼Ż¼│Żė├Ą─▀BĮėĘĮ╩Į×ķó┘╣▓Ļ¢(y©óng)ĘĮ╩ĮŻ║░čCP+ĪóDIR+║═EN+Įėį┌ę╗Ųū„×ķ╣▓Ļ¢(y©óng)Č╦Įė═Ō▓┐ŽĄĮy(t©»ng)Ą─+5VŻ¼├}ø_ą┼╠¢(h©żo)Įė╚ļCP-Č╦Ż¼ĘĮŽ“ą┼╠¢(h©żo)Įė╚ļDIR-Č╦Ż¼╩╣─▄ą┼╠¢(h©żo)Įė╚ļEN-Č╦Ż╗ó┌╣▓ĻÄĘĮ╩ĮŻ║░čCP-ĪóDIR-║═EN-Įėį┌ę╗Ųū„×ķ╣▓ĻÄČ╦Įė═Ō▓┐ŽĄĮy(t©»ng)Ą─GNDŻ¼├}ø_ą┼╠¢(h©żo)Įė╚ļCP+Č╦Ż¼ĘĮŽ“ą┼╠¢(h©żo)Įė╚ļDIR+Č╦Ż¼╩╣─▄ą┼╠¢(h©żo)Įė╚ļEN+Č╦Ż╗ó█▓Ņäė(d©░ng)ĘĮ╩ĮŻ║ų▒Įė▀BĮėĪŻ
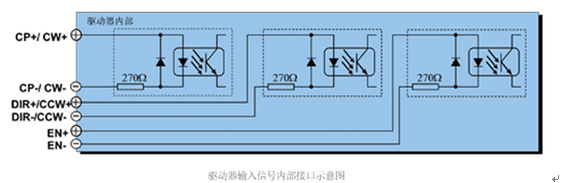
“ī(q©▒)äė(d©░ng)Ų„▌ö╚ļą┼╠¢(h©żo)ā╚(n©©i)▓┐Įė┐┌╩ŠęŌłD
╚ń╣¹“ī(q©▒)äė(d©░ng)Ų„▌ö╚ļą┼╠¢(h©żo)×ķļŖē║ą┼╠¢(h©żo)Ż¼ę¬Ū¾Ż║3.6VĪ▄Ė▀ļŖŲĮĪ▄5.5VŻ╗ -5.5VĪ▄Ą═ļŖŲĮĪ▄0.3VŻ¼ūŅ│Żė├Ą─×ķTTLļŖŲĮĪŻ
╚ń╣¹“ī(q©▒)äė(d©░ng)Ų„▌ö╚ļą┼╠¢(h©żo)×ķļŖ┴„ą┼╠¢(h©żo)Ż¼ę¬Ū¾Ż║7mAĪ▄Ė▀ļŖ┴„Ī▄18mAŻ╗ -18mAĪ▄Ą═ļŖ┴„Ī▄0.2mAĪŻ
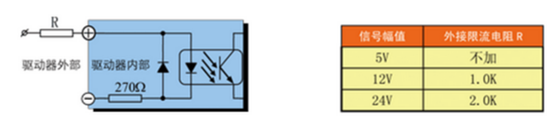
▓╗╣▄╩ŪļŖē║ą┼╠¢(h©żo)▀Ć╩ŪļŖ┴„ą┼╠¢(h©żo)Ż¼ūŅĮK▐D(zhu©Żn)╗»×ķ╣Ō±ŅŲ„╝■Ą─▌ö╚ļļŖ┴„ęį▀_(d©ó)ĄĮą┼╠¢(h©żo)é„▌ö?sh©┤)──┐Ą─Ż©ģó┐╝╔ŽłDŻ®Ż¼╚ń╣¹ļŖē║ą┼╠¢(h©żo)Ą─Ę∙ųĄ│¼│÷ęį╔Žę¬Ū¾Ą─ĘČć·ĒÜį┌═Ō▓┐┴Ē╝ėŽ▐┴„ļŖūĶRŻ¼▒ŻūCĮo“ī(q©▒)äė(d©░ng)Ų„ā╚(n©©i)▓┐╣Ō±Ņ╠ß╣®7-18mAĄ─“ī(q©▒)äė(d©░ng)ļŖ┴„Ż¼ģóęŖ(ji©żn)Ž┬łD║═Ž┬▒ĒĪŻ
▓Į▀M(j©¼n)ļŖÖC(j©®)Ą─▀\(y©┤n)ąą╩Ūė╔├}ø_ą┼╠¢(h©żo)┐žųŲĄ─Ż¼▓Į▀M(j©¼n)ļŖÖC(j©®)į┌├}ø_ą┼╠¢(h©żo)Ą─ėąą¦čžĄĮüĒ(l©ói)Ą─Ģr(sh©¬)┐╠ęŲäė(d©░ng)ę╗éĆ(g©©)▓ĮŠÓĮŪŻ¼▒ŠŽĄ┴ą“ī(q©▒)äė(d©░ng)Ų„Ą─ėąą¦čž╩ŪųĖŻ║├}ø_ą┼╠¢(h©żo)ļŖ┴„Ī░ė╔ąĪĄĮ┤¾Ī▒Ą─Ģr(sh©¬)┐╠Ż¼╗“š▀šf(shu©Ł)├}ø_ļŖŲĮĪ░ė╔Ą═ĄĮĖ▀Ī▒Ą─Ģr(sh©¬)┐╠Ż¼╗“š▀šf(shu©Ł)╩Ū“ī(q©▒)äė(d©░ng)Ų„ā╚(n©©i)▓┐╣Ō±ŅĪ░ė╔Įžų╣ĄĮ┤“ķ_Ī▒Ą─Ģr(sh©¬)┐╠ĪŻ
├}ø_ą┼╠¢(h©żo)Ą─Ņl┬╩ę¬Ū¾▓╗┤¾ė┌200KHzŻ╗
├}ø_ą┼╠¢(h©żo)Ą─īÆČ╚ę¬Ū¾▓╗ąĪė┌2”╠SĪŻ
├}ø_ą┼╠¢(h©żo)Ą─“ī(q©▒)äė(d©░ng)ļŖ┴„ę¬Ū¾×ķ7-18mA
ļŖÖC(j©®)ōQŽ“Ģr(sh©¬)Ż¼ę╗Č©ę¬į┌ļŖÖC(j©®)ĮĄ╦┘═Żų╣║¾į┘ōQŽ“ĪŻōQŽ“ą┼╠¢(h©żo)ę¬Ū¾į┌Ū░ę╗éĆ(g©©)ĘĮŽ“Ą─ūŅ║¾ę╗éĆ(g©©)├}ø_ėąą¦čžĮY(ji©”)╩°ų┴╔┘5”╠Sęį╔Ž▓┼─▄Ė─ūāōQŽ“ą┼╠¢(h©żo)Ż¼Ūę▓╗£■║¾Ž┬ę╗éĆ(g©©)├}ø_ą┼╠¢(h©żo)Ą─ėąą¦čžĪŻ
╚ń╣¹╩╣ė├ļp├}ø_CW/CCWĘĮ╩ĮŻ¼ätę¬Ū¾Ž┬ę╗éĆ(g©©)ĘĮŽ“Ą─Ą┌ę╗éĆ(g©©)├}ø_Ż©╚ńCCWŻ®į┌Ū░ę╗éĆ(g©©)ĘĮŽ“Ą─ūŅ║¾ę╗éĆ(g©©)├}ø_Ż©CWŻ®ėąą¦čž║¾ų┴╔┘5”╠s▓┼─▄ėąą¦ĪŻ